Self Re-configuring Modular Robots – The Future Robots
The concept of modular robots is an answer that came to meet the hardness of robots with static forms. The wide variety of robots is the result of high numbers in the form of a combination of shapes and forms. The robots used to clean the house have special shapes and sizes, while an industrial robot comes with a completely different design. Under the concept, the idea is to create many similar robots which can be added to create a specific robot, the classical concept of a robot designed for specific tasks. Each module has a control unit and connection mode, but can not be used separately due to a lack of accessories. To develop a modular robot in the future, there will be a specific focus which can repair the structure made, one optimal time for reconstructing, or an optimal configuration.
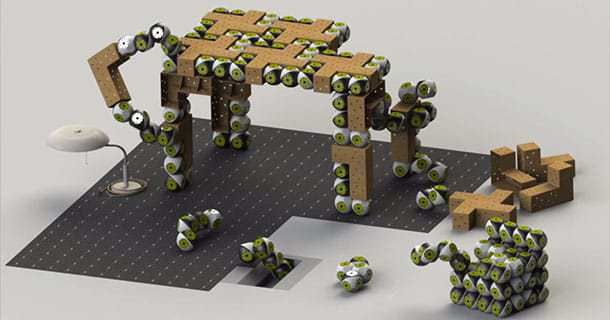
A modular self-reconstructing robotics system includes controls, design and construction for kinetic machines with variable modalities. Generally, they are small robots that can connect to each other to communicate to move mechanical force and electrical power. These robots are able to organize in a new situation according to the configuration. This configuration involves changing the connection and making decisions based on new tasks. Based on the area of activity, the new structure created can be used as an accessory, catchers, wheels, cameras etc.
Comparable to the classical robot system, modular robot systems have a big advantage and are capable of doing different functions only from the ability to adjust and connection to make different forms. One of the important tasks where such a system is needed is space exploration. The ability of these modules to self-repair is one of the essential features in the space mission. Another important feature is the automatic adjustment of size according to the new typography. Education and research are other areas where such robotic systems are used. There are classic robots used in earthquake disaster situations, but there is limited functionality. A modular platform solution can be found to find the victims in a useful time for the rescue team. These robots can scan the area and change their shape to move through tight places. Also, the robot can be equipped with a video camera to transmit images in the command centre.